Протокол Can использует оригинальную систему адресации сообщений. Каждое сообщение снабжается идентификатором, который определяет назначение передаваемых данных, но не адрес приемников.
Любой приемник может реагировать как на один, так и на несколько идентификаторов. На один идентификатор может реагировать несколько приемников.
Протокол can обладает развитой сетью обнаружения и сигнализации ошибки, для этих целей используется поразрядный контроль, прямое заполнение битового потока, проверка пакета сообщения crc-полиномом, контроль форм пакета сообщения, подтверждение правильности приема пакетов данных.
Общая вероятность необнаруженной ошибки 4,7 *Е10-11.
Система арбитража протокола can исключает потерю информации временем при «столкновениях» на шине.
Интерфейс, с применением протокола can легко адаптируется к физической среде передачи данных. Несложно делается гальваническая развязка. Элементы can широко изготавливаются в индустрии.
Другой вариант ответа:
Промышленная сеть реального времени CAN представляет собой сеть с общей средой передачи данных. Это означает, что все узлы сети одновременно принимают сигналы передаваемые по шине. Невозможно послать сообщение какому-либо конкретному узлу. Все узлы сети принимают весь трафик передаваемый по шине. Однако, CAN-контроллеры предоставляют аппаратную возможность фильтрации CAN-сообщений.
Каждый узел состоит из двух составляющих. Это собственно CAN контроллер, который обеспечивает взаимодействие с сетью и реализует протокол, и микропроцессор (CPU).
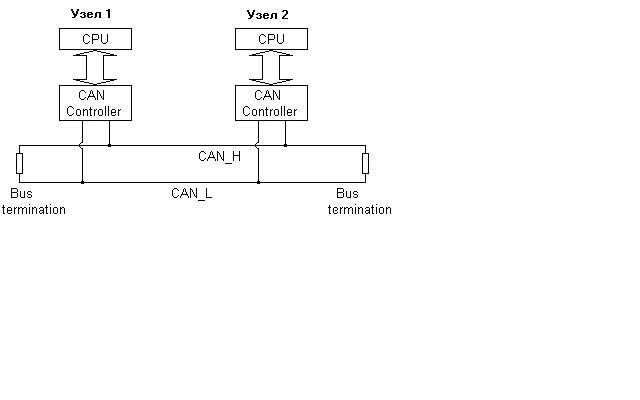
Рис. 1. Топология сети CAN.
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии - CAN_H (can-high) и CAN_L (can-low), по которым передаются сигналы. Логический ноль регистрируется, когда на линии CAN_H сигнал выше, чем на линии CAN_L. Логическая единица - в случае когда сигналы CAN_H и CAN_L одинаковы (отличаются менее чем на 0.5 В). Использование такой дифференциальной схемы передачи делает возможным работу CAN сети в очень сложных внешних условиях. Логический ноль - называется доминантным битом, а логическая единица - рецессивным. Эти названия отражают приоритет логической единицы и нуля на шине CAN. При одновременной передаче в шину лог. нуля и единицы, на шине будет зарегестрирован только логический ноль (доминантный сигнал), а логическая единица будет подавлена (рецессивный сигнал).